
Page 68 - Công nghệ kỹ thuật và công nghệ thông tin trong tiến trình công nghiệp hóa - hiện đại hóa Đồng bằng sông Cửu Long
P. 68
để không gây ra hiện tượng over modulation. Cần lưu ý rằng, đối với độ điều
khiển PI có đầu ra là tốc độ quay của động cơ và đầu vào hồi tiếp là điện áp
trên tụ liên kết, tín hiệu tham chiếu sẽ mang dấu âm và tín hiệu hồi tiếp sẽ
mang dấu dương (giống như hình dưới). Khi điện áp liên kết lớn hơn điện áp
tham chiếu, sai số sẽ mang dấu dương, bộ điều khiển sẽ tăng tốc động cơ để
tăng dòng xả tụ , nhằm đưa điện áp giảm xuống bằng với điện áp tham
chiếu , , và ngược lại. Bộ điều khiển điện áp cho hệ pin quang điện cũng
hoạt động theo nguyên lý này.
3.3 KẾT QUẢ TRIỂN KHAI NGHIÊN CỨU
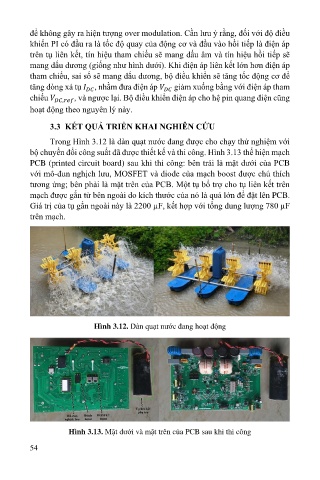
Trong Hình 3.12 là dàn quạt nước đang được cho chạy thử nghiệm với
bộ chuyển đổi công suất đã được thiết kế và thi công. Hình 3.13 thể hiện mạch
PCB (printed circuit board) sau khi thi công: bên trái là mặt dưới của PCB
với mô-đun nghịch lưu, MOSFET và diode của mạch boost được chú thích
tương ứng; bên phải là mặt trên của PCB. Một tụ bổ trợ cho tụ liên kết trên
mạch được gắn từ bên ngoài do kích thước của nó là quá lớn để đặt lên PCB.
Giá trị của tụ gắn ngoài này là 2200 µF, kết hợp với tổng dung lượng 780 µF
trên mạch.
Hình 3.12. Dàn quạt nước đang hoạt động
Hình 3.13. Mặt dưới và mặt trên của PCB sau khi thi công
54